
AGV LGV IGV SLAM ALGORITHM - OPTIMUS CONTROL INDUSTRY PLT
26 Dec 2018
View Full Size
SLAM (Simultaneous localization and mapping) is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it.
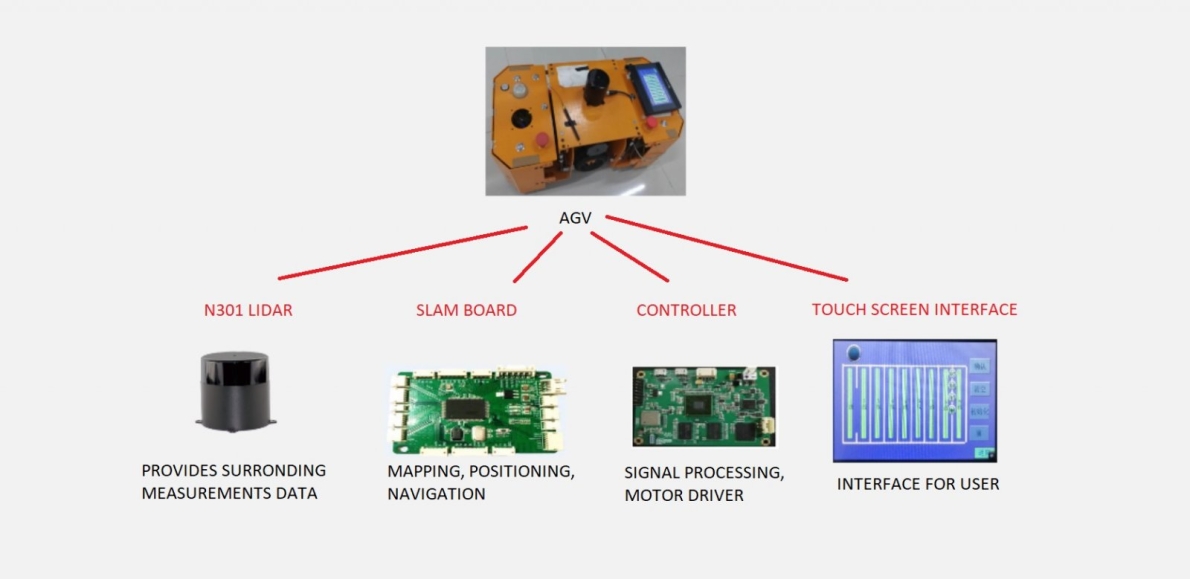
LS SLAM solution consists of 4 major components:
1) LIDAR sensor
2) SLAM BOARD
3) CONTROLLER
4) USER INTERFACE (TOUCH SCREEN)
It has the functions of:
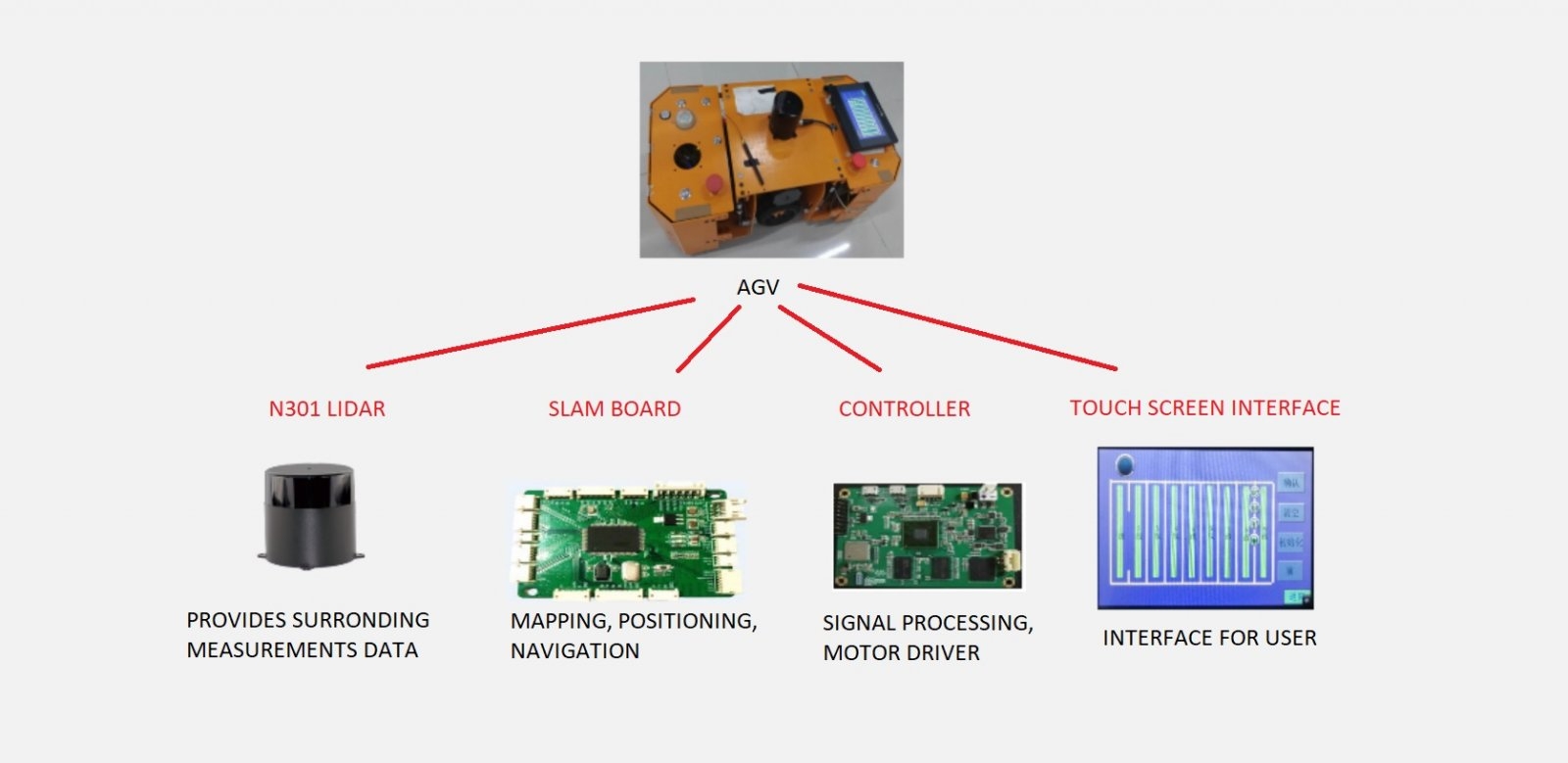
LS SLAM solution consists of 4 major components:
1) LIDAR sensor
2) SLAM BOARD
3) CONTROLLER
4) USER INTERFACE (TOUCH SCREEN)
It has the functions of:
Automatic Mapping in unknown environment
Automatic Optimal Route Seeking
Dynamic Path Planning
Nagivation and positioning
Obstacle avoidance
For more information, please contact: sales@optimuscontrol.com.my
For more information, please contact: sales@optimuscontrol.com.my